
Hardware in the Loop Test für Motor Control Software
Motor-Control Software Entwicklung Vereinfacht
In modernen Entwicklungsumgebungen ist es unerlässlich, Tests frühzeitig und schnell durchzuführen. Eine der größten Herausforderungen bei eingebetteten Systemen, insbesondere bei Motorsteuerungen, ist die Komplexität der Hardware. Herkömmliche Methoden wie Hardware-in-the-Loop (HIL)-Tests sind oft zeitaufwändig und teuer, insbesondere bei umfangreichen Systemtests.
Die Beschleunigung der Testzyklen steht im Zentrum der Automatisierungsstrategie. Es ist wichtig, jeden Codewechsel innerhalb von Minuten testen zu können, anstatt Wochen auf Ergebnisse zu warten. So erhältst du frühzeitig Rückmeldungen und kannst Fehler schnell beheben.
Herausforderungen bei der Testautomatisierung für eingebettete Systeme
Die Testautomatisierung für eingebettete Systeme wie Motorsteuerungen ist besonders anspruchsvoll. Hardware-abhängige Tests, die eine vollständige Elektronikeinheit, Motoren, Pumpen und Hydrauliksysteme einbeziehen, dauern oft mehrere Wochen. Darüber hinaus gibt es häufig mechanische oder umweltbedingte Probleme, die automatisierte Tests behindern können, wie etwa das Auslaufen von Flüssigkeiten oder das Einfrieren von Komponenten.
Hier setzt miniHIL an: er bietet eine hardwareunabhängige Testumgebung, die die reale Hardware simuliert und so eine schnelle und zuverlässige Testautomatisierung ermöglicht.
Die Lösung
Der miniHIL ist darauf ausgelegt, die realen Hardwarekomponenten durch Simulationen zu ersetzen und so eine schnellere Integration und tiefere Tests zu ermöglichen. Dies bedeutet, dass Sie nicht mehr auf langsame und teure Hardwaretests angewiesen sind, sondern Softwareänderungen auf tatsächlichen Prozessoren testen können. Mit dem miniHIL simulierst du Umgebungen und ermöglichst dir, den vollständigen Software-Stack – inklusive Treibern, Steuerungen und Bussystemen – in Echtzeit zu testen.
Vorteile der Simulation mit dem miniHIL
Ein wesentlicher Vorteil der miniHIL-Testumgebung ist die Möglichkeit zur Fehlerinjektion. Dies bedeutet, dass Entwickler gezielt Sensor- oder Steuersignale unterbrechen können, um zu überprüfen, wie das System auf Fehler reagiert. Diese Art von Simulation ermöglicht eine tiefere Testautomatisierung, da nicht nur die „glücklichen Pfade“, sondern auch Fehlerszenarien getestet werden können.
Ein weiterer entscheidender Aspekt ist die Fähigkeit, geschlossene Regelkreise zu simulieren. Das bedeutet, dass die Simulation nicht nur Signale abspielt, sondern aktiv auf Steuerbefehle des Systems reagiert. Dadurch wird das Verhalten eines echten Motors realitätsnah nachgebildet, was besonders bei der Entwicklung von Motorsteuerungen wichtig ist.
Testebenen und Testmethoden
Um die Komplexität von eingebetteten Systemen vollständig zu erfassen, wird in verschiedenen Testebenen gearbeitet:
Focus of Test Levels and Methods
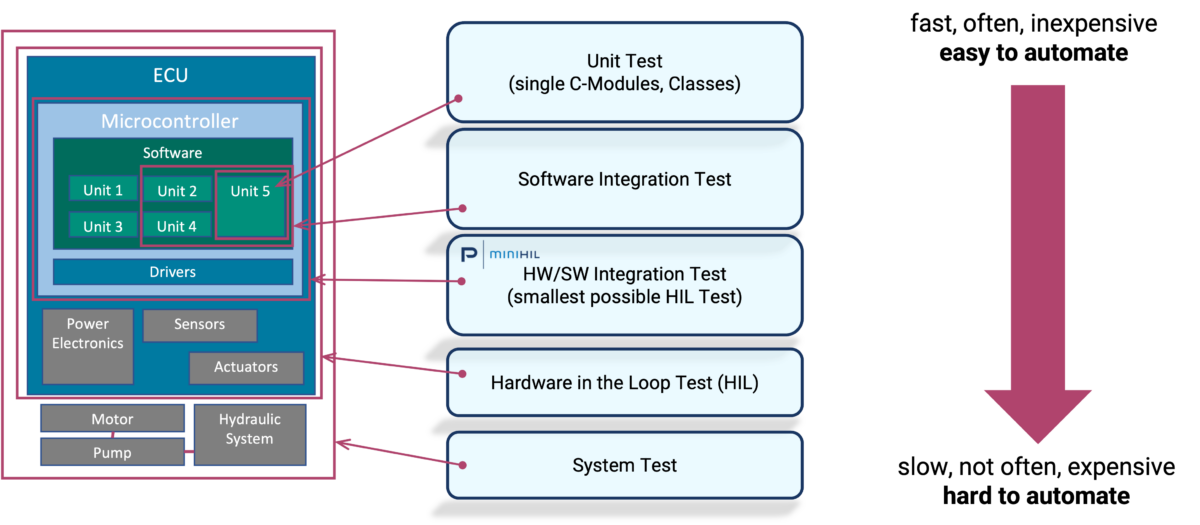
- Unit-Tests und Software-Integrations-Tests: Testen einzelner Softwarekomponenten, die leicht automatisierbar sind.
- Hardware-Software-Integrationstests: Integrationstests von Treibern, Sensoren und Motorsteuerungen, die auf dem miniHIL ausgeführt werden können.
- “großer” Hardware-in-the-Loop Test:
- Systemtests: Diese Tests sind komplexer und schwerer zu automatisieren, bleiben aber unverzichtbar für die endgültige Systemvalidierung.
Anwendungsbeispiel: Testen von Motorsteuerungen
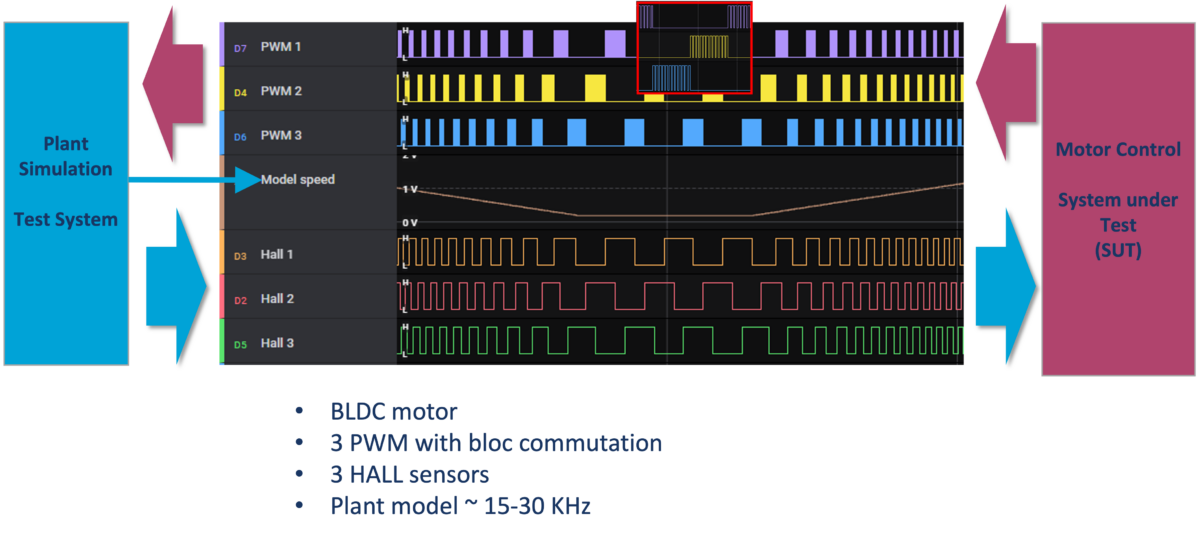
Ein praktisches Beispiel für die Leistungsfähigkeit vom miniHIL ist die Testautomatisierung für BLDC-Motorsteuerungen. Anstelle eines echten Motors simuliert der miniHIL den Motor und die zugehörigen Sensoren, sodass Tests wie Temperaturabschaltungen und Überstromtests in einem Bruchteil der Zeit durchgeführt werden können. Während herkömmliche Tests bis zu 30 Tage dauern können, kann der miniHIL den gesamten Testzyklus auf 50 Minuten reduzieren – eine enorme Zeitersparnis, die kontinuierliche Integration und schnelle Rückmeldungen ermöglicht.
Beispiel 1: BLDC Motor
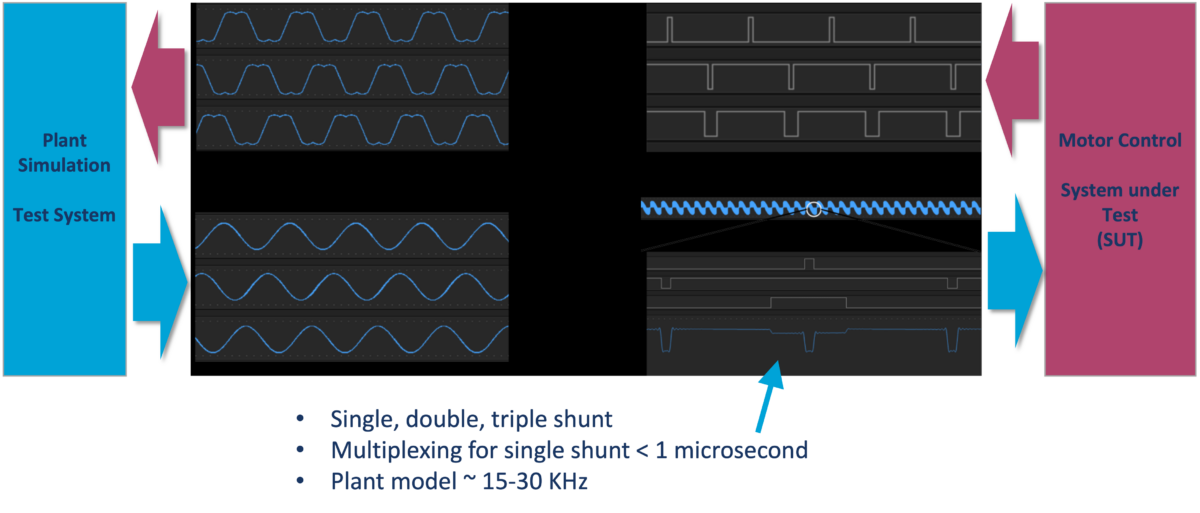
Beispiel 2: Field Oriented Control (FOC)
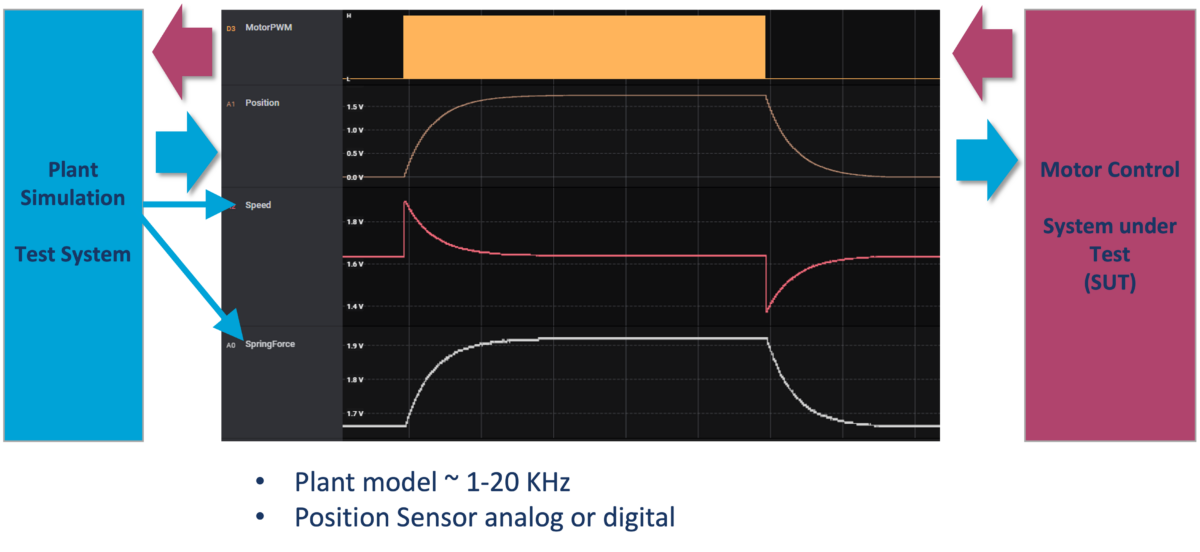
DC Motor mit Spring Reset
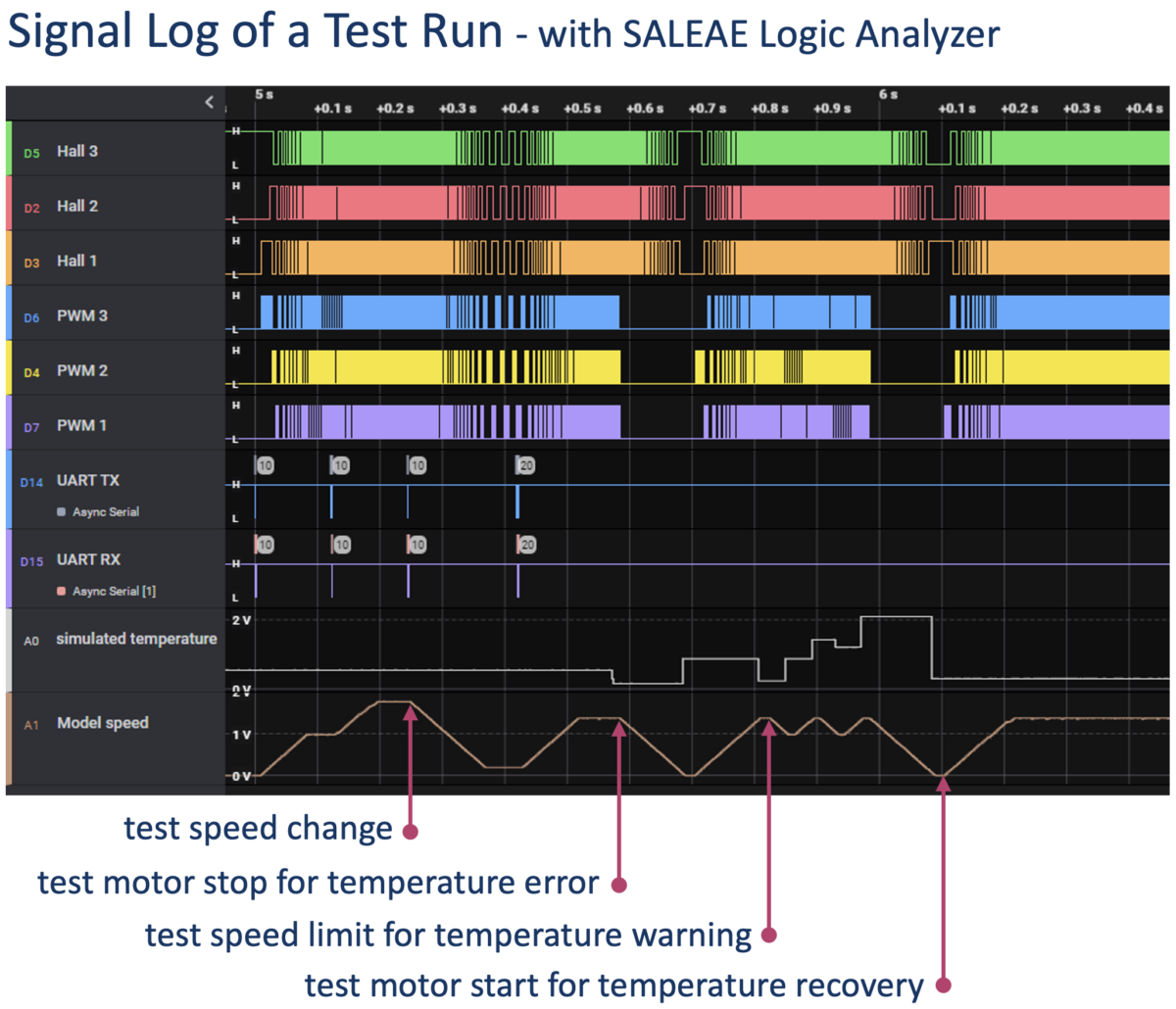
Beispiel Testcases für Motorsteuerungen: Temperaturüberwachung und -abschaltung
Continuous Integration (CI) für vollständige Testautomatisierung
Der miniHIL ist nahtlos in Continuous Integration (CI)-Workflows integrierbar, was bedeutet, dass jede Codeänderung automatisch getestet werden kann. Dies ermöglicht es Teams, auch in verteilten Entwicklungsumgebungen kontinuierlich zu testen und schnell auf Fehler zu reagieren. Durch die Möglichkeit, mehrere miniHIL an einen CI-Server anzuschließen, können parallele Tests in verschiedenen Projekten durchgeführt werden.
Mehr zu Continuous Integration.
Die Automatisierung von Tests für eingebettete Systeme, insbesondere für Motorsteuerungen, ist eine anspruchsvolle Aufgabe, die mit dem miniHIL effizient und skalierbar gelöst wird. Durch die Simulation von Hardwarekomponenten, bietet der miniHIL eine leistungsstarke Lösung zur Beschleunigung von Entwicklungszyklen und zur Verbesserung der Softwarequalität.
